

Le indagini geosismiche vengono spesso realizzate mediante il metodo sismica a rifrazione, che utilizza la determinazione della velocità di propagazione delle onde longitudinali (onde P) e talvolta trasversali (onde S) nel sottosuolo.
Tali onde sono generate, e si propagano nel terreno, ogni qualvolta quest`ultimo è sottoposto a sollecitazioni sia di tipo naturale, sia artificiale (esplosioni, mazze battenti, ecc.).
La tecnica di prospezione sismica a rifrazione consiste nella misura dei tempi di primo arrivo delle onde sismiche generate in un punto in superficie (punto di sparo), in corrispondenza di una molteplicità di punti disposti allineati sulla superficie topografica (geofoni). Lo studio della propagazione delle onde sismiche consente di valutare le proprietà meccaniche e fisiche dei terreni e la compattezza dei materiali da queste attraversati.
Mediante questo tipo di indagine si può risalire alla probabile composizione litologica di massima dei terreni, al loro grado di fratturazione, alla geometria delle prime unità sottostanti la coltre superficiale, alla profondità in cui si trova la roccia di fondo (“bedrock”), alla sua forma e talora, in terreni alluvionali, alla profondità della falda freatica.
L’elaborazione dei dati sismici, con un completo modello matematico bidimensionale appoggiato da procedure iterative, consente di massimizzare la risoluzione e il dettaglio di ricostruzione del modello di velocità attribuito al terreno in esame.
Utilizzando quindi le distanze tra il punto di scoppio e quello di ricezione e i tempi di primo arrivo dei segnali sismici, vengono ricavate le dromocrone (curve tempi-distanze), dalle quali si risale, tramite opportuno programma di calcolo, alle velocità reali nei singoli strati, al loro spessore, profondità, forma ed inclinazione.
Questa procedura di tipo “classico” fornisce un modello di velocità iniziale alla procedura d`iterazione tomografica. Per questa prima parte di procedura interpretativa l’algoritmo utilizzato dal programma di calcolo è stato pubblicato nel 1986 da Dereck Palmer in un articolo dal titolo “The Generalized Reciprocal Method of Seismic Refraction Interpretation”. (Society of Exploration Geophysicists)
Unità di acquisizione dati

Per registrare simultaneamente gli impulsi sismici rilevati dai geofoni è necessario l’utilizzo di una strumentazione elettronica multicanale, a bassissimo rumore interno, ad alta velocità di campionamento, dotata di supporto magnetico per la registrazione dei dati ottenuti dopo opportuna amplificazione filtraggio e conversione analogico/digitale. A questo scopo utilizziamo il nostro sismografo EEG BR24 a 24 canali.
Apparato di ricezione
Per registrare le vibrazioni del terreno si utilizzano 12-24 geofoni del tipo elettromagnetico a bobina mobile con frequenza caratteristica di 4,5-8-14 Hz, che consentono di convertire in segnali elettrici gli spostamenti che si verificano nel terreno. Questi ricevitori si collegano al sismografo tramite degli appositi cavi multipolari.


Apparato di energizzazione
Per generare le onde sismiche è stato utilizzato un apposito fucile sismico. L’impulso di sparo viene trasmesso immediatamente al sismografo per consentire una registrazione sincronizzata al tempo 0.
Le sezioni sismiche sono costituite da 12-24 geofoni allineati a passo costante, e vengono energizzate in cinque, sette o nove punti in
linea interni ed esterni alle stese.
Acquisizione dei dati
L’acquisizione di dati avviene dopo le opportune verifiche di corretto funzionamento della strumentazione e del circuito di time-break (tempo 0).
Elaborazione dei dati
La procedura elaborativa è sinteticamente descrivibile nei passi seguenti.
Trasferimento dei sismogrammi al programma di prelevamento dei tempi di primo arrivo
Emissione delle dromocrone misurate sia in forma grafica che in forma leggibile dal programma di elaborazione tradizionale basato su l’algoritmo GRM (Generalized Reciprocal Method).
Immissione dei valori delle quote dei geofoni e degli spari nel programma di interpretazione GRM e lettura delle dromocrone misurate.
Elaborazione dei dati e interpretazione tradizionale.
Emissione delle sezioni interpretate riportanti le interfacce fra strati di diversa velocità sismica e i valori stessi di velocità. Si noti che le velocità sismiche attribuite a ciascun strato sono caratterizzate da un gradiente nullo in direzione verticale (sono costanti in verticale per ciascuno strato). Vi è una utile possibilità di modellizzare con la procedura GRM delle variazioni orizzontali di velocità che comunque risultano discrete e non continue.
Emissione di un file riportante l’ubicazione e la quota di ciascun punto di sparo e di ciascun geofono, leggibile dal programma di iterazione tomografica e di ray-tracing (tracciamento dei percorsi dei raggi sismici).
Emissione del modello bidimensionale del terreno ricavato dalla procedura GRM sotto forma di una matrice a celle di dimensione definibile (inferiori al metro), adatta ad essere letta dal programma di ray-tracing e di elaborazione tomografica. L’interpretazione GRM viene quindi a fornire il modello iniziale delle velocità del terreno, necessario ad attivare le iterazioni del completo modello matematico bidimensionale (modellizzazione tomografica). Il terreno viene quindi suddiviso in celle di dimensione minima, ciascuna dotata di una diversa velocità sismica e ciascuna pronta a venir modificata dalla procedura di iterazione tomografica allo scopo di ridurre al minimo l’errore fra le dromocrone calcolate in base al modello di terreno e quelle effettivamente misurate durante la prospezione.
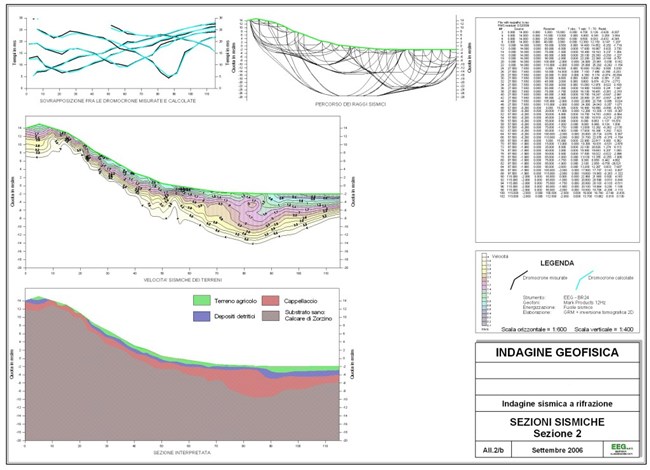
Esempio di sezione sismica
Il file contenente le ubicazioni e le quote viene letto dal programma tomografico assieme al file contenente la matrice di velocità e la procedura di ray-tracing e di controllo viene attivata.
Per prima cosa viene controllata la correttezza delle ubicazioni dei sensori e degli spari e quindi vengono visionati i percorsi dei raggi sismici e valutato il primo “fitting” con i dati misurati, allo scopo di iniziare la procedura tomografica senza la presenza di errori sistematici previamente correggibili.
Lo scopo della procedura iterativa tomografica è quello di ridurre l’errore fra i tempi delle dromocrone calcolate in base al modello rispetto a quelle effettivamente misurate. Questo avviene per approssimazioni successive (iterazioni) controllate dall’operatore al quale è possibile intervenire nella scelta di molti coefficienti che influenzano il calcolo come anche nella scelta della procedura stessa che viene utilizzata per realizzare la minimizzazione degli errori.
Il risultato finale sarà una matrice rappresentativa del terreno indagato costituita da celle ciascuna caratterizzata da una velocità sismica e tale complessivamente da presentare un errore minimo se utilizzata nella procedura di tracciamento dei raggi sismici.
Questa matrice viene visualizzata come sezione sismica tramite un opportuno programma di contouring utilizzando, se ritenuto necessario, diversi colori per diverse velocità.